ROS-SDK
安装 ROS 软件包
Note
支持的ROS版本范围:
Ubuntu 18.04 Melodic (详细信息请见下方注释)
Ubuntu 20.04
- ROS1: Noetic
- ROS2: Foxy, Galactic
Ubuntu 22.04
- ROS2: Humble, Iron
注意, Ubuntu18.04 版本已经停止支持, 提供不再更新的zip存档供下载. 如果需要使用 Ubuntu1804 melodic, 请点击 !!本链接!!. 如果你要使用1804, 请提前咨询售前, 避免购买的硬件不支持对应操作系统的情况.
Note
为防止手敲命令敲错字符, 建议使用 Ubuntu 所带的浏览器直接打开本网址, 并将命令从浏览器中复制到终端.
Warning
注意, 在下载了对应的zip之后,还需要执行以下步骤:
- 进入解压后的文件夹,执行rules复制:
python3 ./src/base/xpkg_comm/scripts/script_init.py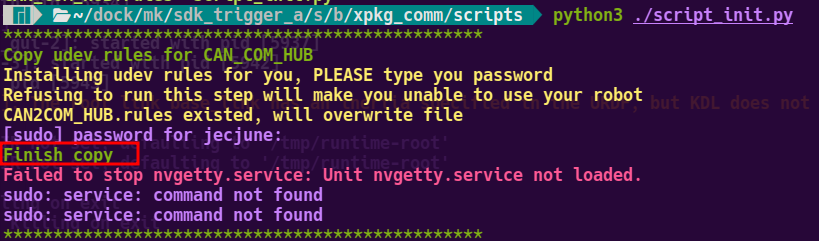 执行结果如上,出现
执行结果如上,出现Finish copy即成功. - 安装插件:
ros-{ROS_DISTRO}-teleop-twist-keyboard - 重启电脑以确保rules正确加载.
- 运行
python3 ./src/base/xpkg_msgs/tools/hex-pkg-init.py初始化软件包.
软件包列表:
- ECHO PLUS SDK:
sdk_echo_plus_ws - ECHO SDK:
sdk_echo_ws - HUMMER SDK:
sdk_hummer_ws - MARK1-DIFF SDK:
sdk_mark1_diff_ws - MARK1-MCNM-PRO SDK:
sdk_mark1_mcnm_pro_ws - MARK1-MCNM SDK:
sdk_mark1_mcnm_ws - MARK2-MCNM SDK:
sdk_mark2_mcnm_ws - RAY SDK:
sdk_ray_ws - TRIGGER-A SDK:
sdk_trigger_a_ws - TRIGGER-C2 SDK:
sdk_trigger_c2_ws - TRIGGER SDK:
sdk_trigger_ws - YORK SDK:
sdk_york_ws
SDK软件包结构说明
各个软件包大同小异, 这里以 ECHO-PLUS 为例.
XXXXXXX:~/sdk_echo_plus_ws$ tree -d -L 3
.
└── src
├── base
│ ├── xpkg_comm
│ └── xpkg_msgs
├── demo
│ └── demo_general_chassis
├── drivers
│ ├── xpkg_power
│ └── xpkg_vehicle
└── urdf
└── xpkg_urdf_echo_plus
11 directories
- base 文件夹: 存放 xpkg_comm 与 xpkg_msgs, 负责机器人与嵌入式层面的通信
- demo 文件夹: 存放 demo launch 文件, 用户可以参考其中的内容编写自己的 launch 文件.
Warning
注意, demo 文件夹中的 launch 文件均设计成为只能同时启动一个. 请不要同时 launch 多个 launch 文件
- drivers 文件夹: 基础机器人驱动软件, 例如充电桩(如果有), 底盘控制等
- urdf 文件夹: 用来放 URDF
如果没有必要, 建议不要改动除了 demo 文件夹之外的任何软件包.
使用SDK软件包
软件包提供了测试demo,请查阅使用ROS的demo